introduction
With the advancement of technology, robotics is developing towards intelligent machines and intelligent systems. Its development trend is mainly modularization and reconfigurability of structures; open and configurable control technologies; digitization of servo drive technology and Decentralization; practical application of multi-sensor fusion technology. The connotation of the robot has also become "an intelligent system with flexible action functions using robotic technology." In the past ten years, the FPGA industry has also developed rapidly. Its position in actual research and development has also risen from processing simple logic to the core processing device of digital systems. The emergence of SOPC (Programmable System-on-Chip) technology makes it possible to integrate the CPU core with the device core and system software into a single chip, which can help users quickly develop the products they need.
In this paper, a single-arm six-degree-of-freedom robot with fixed base is taken as the research object, and an FPGA-based modular robot embedded multi-core master controller design scheme is proposed.
1 Robot path planning
Let the initial and final poses of the manipulator be recorded as: Xe0=[Pe0, ψe0], Xef=[Pef, ψef]. The end of the arm is required to move along the linear path of Xe0 to Xef. The start and end points are Pe0(x0.y0, z0, α0, β0, γ0) and Pef(xf, yf, zf, αf, βf, γf), respectively. The robot's hand grasping track is shown in Figure 1.

Calculate the length of the straight line distance from the initial point and the end point coordinates as:

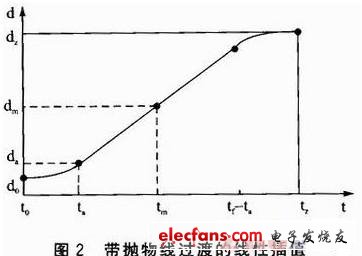
For a path segment, since the transition domains at both ends have the same duration, the same constant acceleration values ​​are used in these two domains, only the opposite signs are used, and the linear interpolation with parabolic transition is shown in Fig. 2.
Based on the acceleration, the end line speed can be obtained. The end line speed is divided into acceleration section, uniform section and deceleration section. The specific expression is:
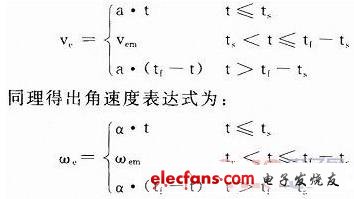
After the line velocity and angular velocity are obtained, the joint angular velocity of each joint can be obtained by the Jacobian matrix, and multiplied by a fixed time to obtain the joint angle at each step.
 
Featuring level VI energy efficiency and meet global safety certifications, the external ac to dc power adapters are available in variety of international different AC input blade versions for United States, Europe, Korea, U.K. and Australia, and provides 8 safety protections. The 12 wattage series wall mount power adapters follows the PC flame retardant plastic case and 3 years warranty.
0 ~ 12 Watt Wall Plug Adapters
Led Christmas Tree Adapter,Universal Travel Adapter,Wall Plug In Adapter,Ac Dc Adaptor Prices,Shenzhen Power Adapter
Shenzhenshi Zhenhuan Electronic Co Ltd , https://www.szzhpower.com