According to Memes Consulting, the growing competition between LiDAR and other sensor technologies—such as cameras, radar, and ultrasound—is driving a stronger need for sensor fusion. This means that engineers must carefully select photodetectors, light sources, and MEMS micromirrors to ensure optimal performance in autonomous systems.
As sensor technology, imaging capabilities, radar, LiDAR, electronics, and artificial intelligence continue to evolve, dozens of advanced driver assistance system (ADAS) functions have become available. These include collision avoidance, blind spot monitoring, lane departure warnings, and parking assistance. These systems work together through sensor fusion, enabling fully automated or unmanned vehicles to perceive their surroundings, alert drivers to potential dangers, and even take evasive action independently when necessary.
For self-driving cars, the ability to accurately detect and identify objects at high speeds is crucial. These vehicles must rapidly create 3D maps of the road ahead, typically up to 100 meters away, and generate high-resolution images at distances of up to 250 meters. In the absence of a human driver, the car’s AI must make quick and accurate decisions based on this data.
One fundamental technique used in this process is Time-of-Flight (ToF), which measures the time it takes for a pulse of energy to travel from the vehicle to a target and back. Knowing the speed of the pulse allows the system to calculate the distance to the object. This pulse can be ultrasonic (sonar), radio (radar), or light-based (LiDAR).
Among these ToF technologies, LiDAR offers the highest angular resolution, making it the preferred choice for applications where precise object recognition is essential. Compared to radar, LiDAR produces less beam divergence, allowing better distinction between closely spaced objects (see Figure 1). This higher resolution is especially important in high-speed scenarios, where there is limited time to react to potential hazards like head-on collisions.
Laser Source Selection
In a ToF LiDAR system, a laser emits a light pulse with a duration of τ. At the moment the pulse is sent, the timing circuit inside the system is triggered. When the reflected light reaches the photodetector, it generates an electrical signal that stops the clock. The measured round-trip time Δt is then used to calculate the distance R to the object.
If the laser and photodetector are aligned, the distance R is influenced by two main factors: the speed of light in a vacuum (c) and the refractive index of the medium (n, which is close to 1 in air). These factors affect the distance resolution ΔR. If the laser spot is larger than the object being detected, the measurement uncertainty increases due to the spatial width of the pulse (w = cτ) and the timing jitter δΔt.
The first factor contributes to ΔR = c × δΔt, while the second is ΔR = w = c × τ. To achieve a distance resolution of 5 cm, δΔt would need to be around 300 picoseconds, and the pulse duration τ should also be approximately 300 picoseconds. This means that ToF LiDAR systems require photodetectors with low timing jitter and lasers capable of emitting very short pulses—often expensive picosecond lasers. In typical automotive LiDAR systems, the pulse duration is about 4 nanoseconds, so minimizing the beam divergence angle is critical.
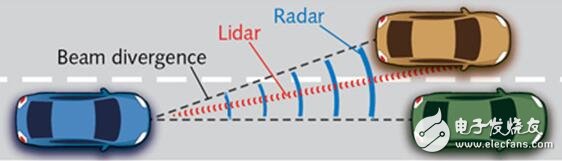
Figure 1 illustrates how the beam divergence angle depends on the ratio of the aperture size to the wavelength of the transmitting element. Radar uses an antenna, while LiDAR uses a lens. A larger ratio results in a wider beam and lower angular resolution. As shown, radar (black) cannot distinguish between two cars, but LiDAR (red) can clearly separate them.
For automotive LiDAR system designers, choosing the right laser wavelength is one of the most critical decisions. Several factors influence this choice, including human eye safety, atmospheric interaction, available laser types, and compatible photodetectors.
The two most commonly used wavelengths are 905 nm and 1550 nm. 905 nm has the advantage of being detectable by silicon-based photodetectors, which are more cost-effective. However, 1550 nm is safer for the human eye, allowing higher energy per pulse, which is important for maximizing the photon budget. This makes 1550 nm a popular choice for long-range applications.
Atmospheric conditions also play a role. Light at 1550 nm experiences more water absorption, leading to greater signal loss compared to 905 nm. While this might seem like a disadvantage, the trade-off is often worth it for the improved safety and performance in certain environments. Ultimately, the choice between 905 nm and 1550 nm depends on the specific requirements of the LiDAR system and the operating conditions it will face.
Grain Bin Full Sensor,Grain Auger Full Bin Alarm,Grain Bin Full Alarm,Grain Bin Full Indicator
Changzhou Youeryou Trading Co., Ltd. , https://www.farmpartssupplier.com