According to Memes Consulting, the growing competition between LiDAR and other sensor technologies—such as cameras, radar, and ultrasound—is driving the need for sensor fusion. This means that developers must carefully select photodetectors, light sources, and MEMS micromirrors to ensure optimal performance in autonomous systems.
As sensor technology, imaging, radar, LiDAR, electronics, and artificial intelligence continue to advance, numerous advanced driver assistance system (ADAS) functions have been implemented. These include collision avoidance, blind spot monitoring, lane departure warnings, and parking assistance. Such systems rely on sensor fusion to synchronize data, enabling fully automated or unmanned vehicles to detect their surroundings, warn drivers of potential hazards, and even take evasive actions independently when necessary.
Self-driving cars must also be capable of identifying and distinguishing objects at high speeds. They use distance measurement techniques to quickly generate 3D maps of roads up to 100 meters ahead and create high-resolution images at distances of up to 250 meters. When a human driver is not present, the vehicle’s AI must make quick, accurate decisions based on real-time data.
One of the fundamental methods used in this process is measuring the time-of-flight (ToF) of an energy pulse emitted from the vehicle to a target and back. Knowing the speed of the pulse through the air allows for precise calculation of the distance to the reflection point. The pulse can be ultrasonic (sonar), radio (radar), or light-based (LiDAR).
Among these ToF technologies, LiDAR stands out due to its higher angular resolution. This makes it more effective than radar in distinguishing closely spaced objects, as shown in Figure 1. Higher angular resolution is especially crucial in high-speed scenarios where quick reaction times are essential to avoid collisions.
Laser Source Selection
In ToF LiDAR systems, a laser emits a light pulse with a duration τ, which triggers the internal timing circuit. When the reflected pulse reaches the photodetector, it generates an electrical signal that stops the clock. This electronic measurement of the round-trip ToF (Δt) is used to calculate the distance R to the target.
In practice, if the laser and photodetector are positioned at the same location, two main factors affect the measured distance R: the speed of light in a vacuum (c) and the refractive index (n) of the medium through which the light travels. These factors influence the distance resolution ΔR. If the laser spot size exceeds the target size, there may be uncertainty in measuring the spatial width w (w = cτ) and the pulse timing δΔt.
The first factor contributes to ΔR = c × δΔt, while the second is ΔR = w = c × τ. For a distance resolution of 5 cm, this implies that δΔt is approximately 300 picoseconds and τ is around 300 picoseconds. ToF LiDAR systems require photodetectors with low time jitter and lasers that emit short pulses, often in the picosecond range. However, in typical automotive LiDAR systems, the pulse duration is about 4 nanoseconds, necessitating a minimum beam divergence angle.
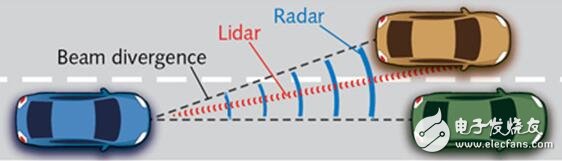
Figure 1: The beam divergence angle depends on the ratio of the aperture size to the wavelength of the transmitting element. Radar, with a larger beam divergence, has lower angular resolution compared to LiDAR. As shown, radar (black) cannot distinguish between two cars, while LiDAR (red) can.
For automotive LiDAR system designers, selecting the appropriate wavelength is one of the most critical decisions. Several factors influence this choice, including human eye safety, atmospheric interaction, available laser options, and compatible photodetectors.
The two most commonly used wavelengths are 905 nm and 1550 nm. The advantage of 905 nm lies in its compatibility with silicon-based photodetectors, which are cost-effective. However, 1550 nm is safer for the human eye, allowing for higher energy per pulse, which is important for the overall photon budget.
Atmospheric conditions, such as scattering from airborne particles and absorption by water vapor, affect signal strength and depend on the wavelength. While 905 nm experiences less loss due to water absorption, 1550 nm offers better eye safety. In real-world environments, where weather and surface reflectivity vary widely, choosing the right wavelength becomes a complex but essential decision for reliable LiDAR performance.
Auger Bearing Seat,Auger Bearings,Auger Hanger Bearings,Bearing Seats
Changzhou Youeryou Trading Co., Ltd. , https://www.farmpartssupplier.com