Robots are currently widely used and have played an important role in industries, scientific research, medicine and other fields. We know that robot commands need to be provided by us. At present, the instructions of industrial robots are generally input through the teaching box. The teaching box provides a simple man-machine interface, which can help complete simple teaching tasks. However, in many applications, it is impossible to meet the requirements by teaching input only. In the laser processing robot system, there are tens of thousands of instructions to the robot, and the parameters of the instruction cannot be taught, and are provided by other measurement systems. In this case, the host computer needs to send commands to the robot controller. This requires real-time communication between the robot controller and the host computer. Robot commands have a fixed format, and robot communication has its particularity. In order to ensure the reliability of communication and improve the communication efficiency, the corresponding communication protocol can be formulated according to the characteristics of robot communication, and a dedicated host computer communication control that is more suitable for industrial applications can be made.
1 Robot master computer
The most important of the robot controllers is the main control computer. In the laser processing robot, the main control computer adopts the embedded single-board computer based on PC bus S 104 / 486DX industrial control level
The core of the computer is the AMD 80486 DX microprocessor. The host computer provides a serial interface and can communicate with it through serial ports. The information processing inside the main control computer is realized by the robot controller operating system. The entire system is implemented with the real-time multi-task operating system VRTXsa, which has good real-time performance and reliability, as well as a perfect task management mechanism.
2 Laser processing robot communication system structure
The motion instructions of the robot come from the communication system. In our communication system, it mainly includes the host computer application program, serial port control, serial port and robot main control computer (hereinafter referred to as the lower computer). The host computer application program generates instructions, accesses the serial port through the control, and transmits the instructions to the lower computer. After the lower computer receives the instruction, it analyzes the instruction. For the lower-level computer, these instructions are divided into two types: one is to interpret the execution instruction, which needs to enter the command queue, queue execution, and occupy the cache; the other is to execute the instruction immediately, without entering the queue and does not occupy the cache. For interpreting and executing instructions, after the lower computer receives it, it puts the instruction in the queue and returns an answer immediately. For immediate execution instructions, execute the instruction first, and then return a response. The query instruction is an immediate execution instruction. In addition to returning the command in the command word, the lower computer also returns the corresponding value. The host computer judges the communication status according to the returned response and performs corresponding processing.
3 Communication protocol
Our laser processing robot communication system has the following characteristics:
1) The robot will only work according to the instructions. If there are problems with the instructions, it will bring unpredictable consequences. Therefore, for our communication system, reliability and security are of primary importance.
2) The working environment of the robot is relatively harsh, and various interferences are relatively large. The anti-interference ability and error handling ability of communication are very important.
3) In order to improve the processing efficiency, it is hoped that the robot can work at a faster speed.
In order to avoid "empty instructions" from the robot, the communication speed should keep up. Based on the characteristics of the robot communication system, the host computer must communicate with it to meet its specific requirements. We use the following communication methods:
(1) Master-slave mode. The upper computer is the master, and the lower computer is the slave. In general, the lower computer cannot actively send information to the upper computer. Only after the host computer issues commands to the lower computer can the lower computer respond. In this way, through the host computer, we can well control the entire communication process.
(2) Data frame mode. The use of data frames helps ensure the integrity of data packets and facilitates data reception and processing. In our communication system, both the upper computer and the lower computer use the same protocol to pack and unpack communication data. We define the frame header as eb 90 82, the frame end as 9082, and the frame flag as f0. In addition, if there is a 90 in the valid data, double-write 90 to distinguish the 900 data frame format at the end of the frame as follows:
{Frame header, frame flag, communication data, frame end, parity word}
In addition, in our communication process, we must deal with various types of data, including char ', short type, float type, byte type, etc., add identifiers before valid data to identify them. For example, f0 06 means 6 floating-point numbers, and f3 05 means 5 characters.
(3) Checksum. This is a simple and practical verification method. Before the host computer sends the command, it automatically calculates the sum of the data, attaches it to the end of the data frame, and sends it to the lower computer together. After receiving the data frame, the lower computer unpacks it first, then calculates the data sum again, and compares it with the checksum at the end of the data frame. vice versa. In this way, you can check whether the data has mutated during transmission.
(4) Automatic retransmission mechanism. When the lower computer receives an erroneous data frame, it will discard the data frame and return an error code to the upper computer to report the error. At this time, the frame data needs to be resent. If the retransmission task is given to the application, the program will become more complicated. We give this task to the control, and the retransmission function can be easily achieved. Inside the control, when new data is sent, the data is backed up until it is confirmed that the reception is correct, and then it is deleted. If an error is found, send it again.
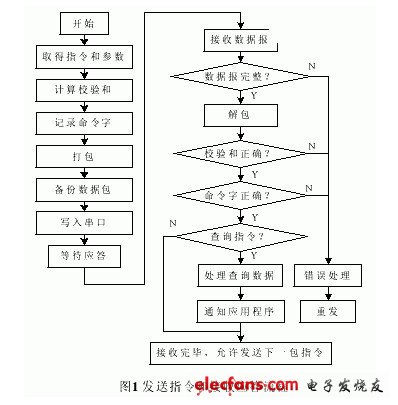
(5) Response method. In the communication process, the lower computer must respond to each frame of data of the upper computer. The host computer judges the communication status according to the returned response, and then proceeds to the next step. For the sake of safety, it is stipulated that only after confirming the correct response of the previous packet of instructions, the next packet of instructions can be sent. For non-query instructions (including all interpreted execution instructions and partial immediate execution instructions), the lower computer returns the command word of the instruction after receiving it; for query instructions, in addition to returning the command word, it also returns query data, such as the robot ’s Position, rotation angle of each axis, etc. If the lower computer detects a problem with the data frame, such as no frame header, checksum error, etc., it returns the corresponding error code. When the host computer sends the command, it also records the command word of the command. After receiving the response returned by the lower computer, compare the command word with the reserved command word. If they are the same, it means that the transmission is correct and the next instruction can be sent; otherwise, it means that there is a problem with the instruction transmission and the error is made according to the error code Process and resend the current command packet. The process of instruction sending and response receiving is shown in Figure 1.
(6) Group command sending method. Because the robot runs very fast, in order to ensure that the command sending speed can keep up with the running speed, multiple commands are sent at the same time in a datagram, and the lower computer only needs to answer the first command. This reduces response time and improves the speed at which commands are sent. In actual application, we use 7 instructions for one datagram, and the results show that the speed is about 37 faster. For security and processing convenience, the control only allows interpretation and execution of instructions to be sent in groups. For immediate instructions, only single instruction datagrams can be sent.
General specifications
Base speed: 2 Detachable shaft: lock & unlock sign
LED light: No Speed setting: 10
Technical specifications
Power: 200W/250W/300W Frequency: 50/60 Hz
Voltage: 220-240V Cord length: 1.2 m
Design specifications
Material body: ABS Surface finishing: injected color
Material rod: Stainless steel Material blade: Stainless steel
Material measure cup & chopper: SAN
Dishwasher attachments: Yes
Approvals
GS/CE/CB/LVD/EMC/ROHS/LFGB/DGCCRF/REACH/ERP
Optional Accessories
A. Mixer Beater (s/s)
B. Mixer whisk (s/s)
C. Potato masher
D.550ml measure cup
F. 700ml measure cup
G.350ml chopper
H.700ml Chopper with non-slip base
I. Fine slicer & Julienne Disc, Rough slicer & Julienne Disc, Shred Disc.(For 700ml chopper use only)
K. Wall mounting
L. Bracket

3-In-1 Twisting Handheld Mixer,Hand Food Mixer ,Cordless Mixer With Stand,Mini Hand Mixer Blender
Housoen Electric Manufacture Co., Ltd. , https://www.housoenappliances.com